
Space debris removal. Active & passive systems
Space debris removal. Active & passive systems
Space debris removal. Active & passive systems
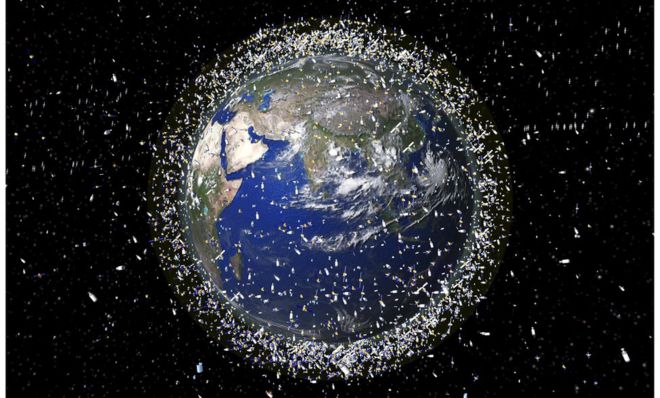
The space debris problem emerged in the second half of the 20th century with the launch of first artificial Earth satellites. Left at earth orbits, space objects began to pose a threat to functioning spacecraft and, in particular, to stations with crews on board.
With the expansion of space exploration the population of space debris began to grow rapidly. It required appropriate measures to be taken. In 1993, a number of space agencies created the Inter-Agency Space Debris Coordination Committee (IADC). The primary purposes of this organization are to exchange information between committee members, to facilitate opportunities for cooperation, and to identify debris mitigation options. This committee has developed the “IADC Space Debris Mitigation Guidelines”.
Ukraine has also developed and adopted an appropriate document “Limitation of Near-Earth Orbital Debris Making at Operation of Space Technical Equipment” from July 19th, 2006 which dictates fundamental rules of space activities in Ukraine. All basic regulations of this document correspond to the Inter-Agency Space Debris Coordination Committee’s international recommendations.
Currently, many leading space companies are developing space debris removal systems. These systems can conditionally be divided into two types: passive and active ones.
Passive systems are mounted onto objects that have to be deorbited in advance, and are activated after their mission’s complete. These systems can use different physics for deorbitation. The Yuzhnoye State Design Office proposes devices the operation principle of which lies in augmentation of their aerodynamic drag force by creating a large surface area due to inflation/deployment of special structures.
Active systems represent autonomous spacecraft able to deorbit space debris objects and/or remove them to special graveyard orbits.
ACTIVE SYSTEMS
LEOSWEEP PROJECT
LEOSWEEP
ACTIVE SYSTEMS
The space debris problem becomes more and more actual with every space mission. Total weight of space debris at LEO is about 2500 tons (by 2013), and much of it is LVs upper stages. Collisions of spacecraft with space debris objects will become progressively real threat for future space missions.
Getting a capability to deorbit a few types of LVs upper stages is a relevant objective for global space community.
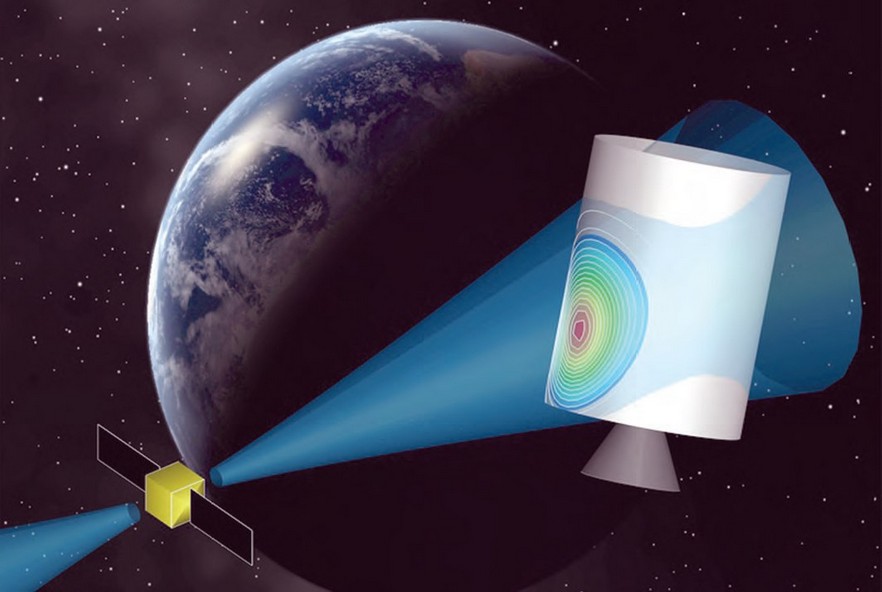
In 2013, Yuzhnoye SDO began works on realization of ambitious research project LEOSWEEP implemented under the FP7 Program of EU. The goal of the Project is to demonstrate the technological feasibility of a first active removal mission of a Ukrainian rocket upper stage, using ion beam technology, which provides an efficient and low-risk contactless manipulation of the debris to be deorbited.
In frames of LEOSWEEP project Yuzhnoye SDO activities were focused on demonstration mission design of LV upper stage removal with ion beam from nearby orbiting shepherd spacecraft and safety analysis of operation and upper stage reentry.
Analysis of the effect of ion beam irradiation on material of the outer surface of the Cyclone-3 LV upper stage was performed. Material sample of outer surface was manufactured and tested in simulated space environment validating safety of contactless manipulation of the object with ion beam. Analysis of the survivability of the LV upper stages during reentry showed that some parts of engine and propellant tanks may reach the ground, which requires specific drop zones.
This project was partially funded under the European Union’s Seventh Framework Programme for research, technological development and demonstration under grant agreement №607457.
Detailed information is available here: www.leosweep.upm.es
SPACE SYSTEM FOR ACTIVE SPACE DEBRIS REMOVAL
SPACE SYSTEM FOR
ACTIVE SPACE DEBRIS REMOVAL
ACTIVE SYSTEMS
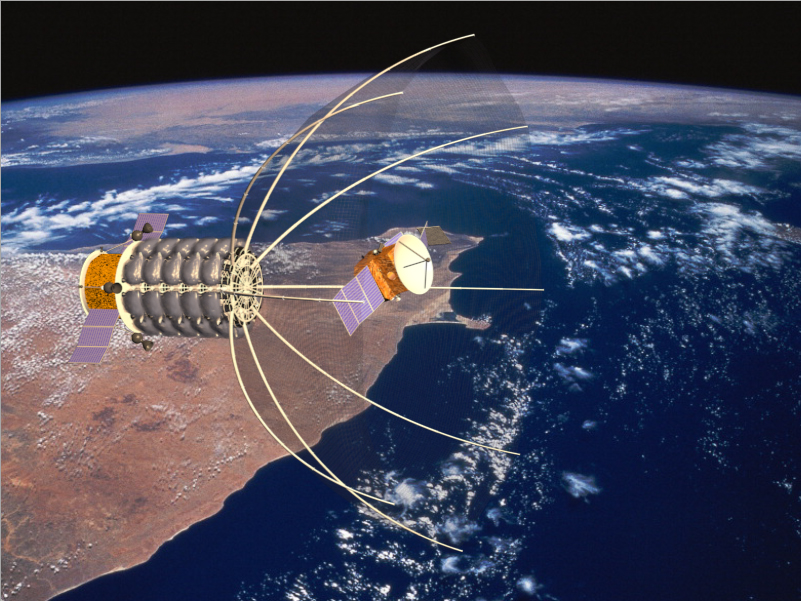
The Space System is designed for effective deorbitation of medium-size space debris objects (with weights up to 1,000 kg and 5 m across) from low Earth orbits (up to 1,000 km).
The Space System includes:
| Interceptor Spacecraft characteristics | |
| Dry mass, kg | ~ 1 000 |
| Propellant mass for maneuvering, kg | ~ 600 |
| Number of capturing modules | 6 |
| Capturing Module characteristics | |
| Structure mass, kg | ~ 200 |
| Propellant mass for deorbitation, kg | ~ 200 |
Deorbitation time of a 1,000-kg space debris object from an altitude of 1,000 km is one and a half orbit passes.
PASSIVE SYSTEMS
INFLATABLE DRAG SYSTEM
INFLATABLE DRAG SYSTEM
PASSIVE SYSTEMS
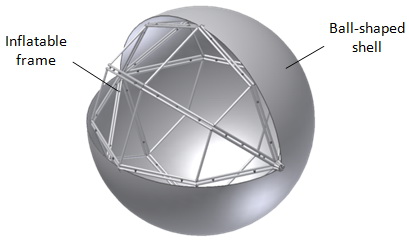
The Inflatable Frame Drag System consists of an inflatable frame and a ball-shaped shell. The frame represents a tubular structure that consists of hermetic elements.
The length of the sleeve elements is chosen in such a way that, when operating, the inflatable frame’s shape would ensure the stretching of external shell close to the form of a sphere.
Inflating of the frame is conducted through separate sleeves each of which fills with gas its own frame element. The system does not lose its operability even if one of the frame elements is damaged by space debris.
Technical characterictics
SAIL DRAG SYSTEM
SAIL DRAG SYSTEM
PASSIVE SYSTEMS
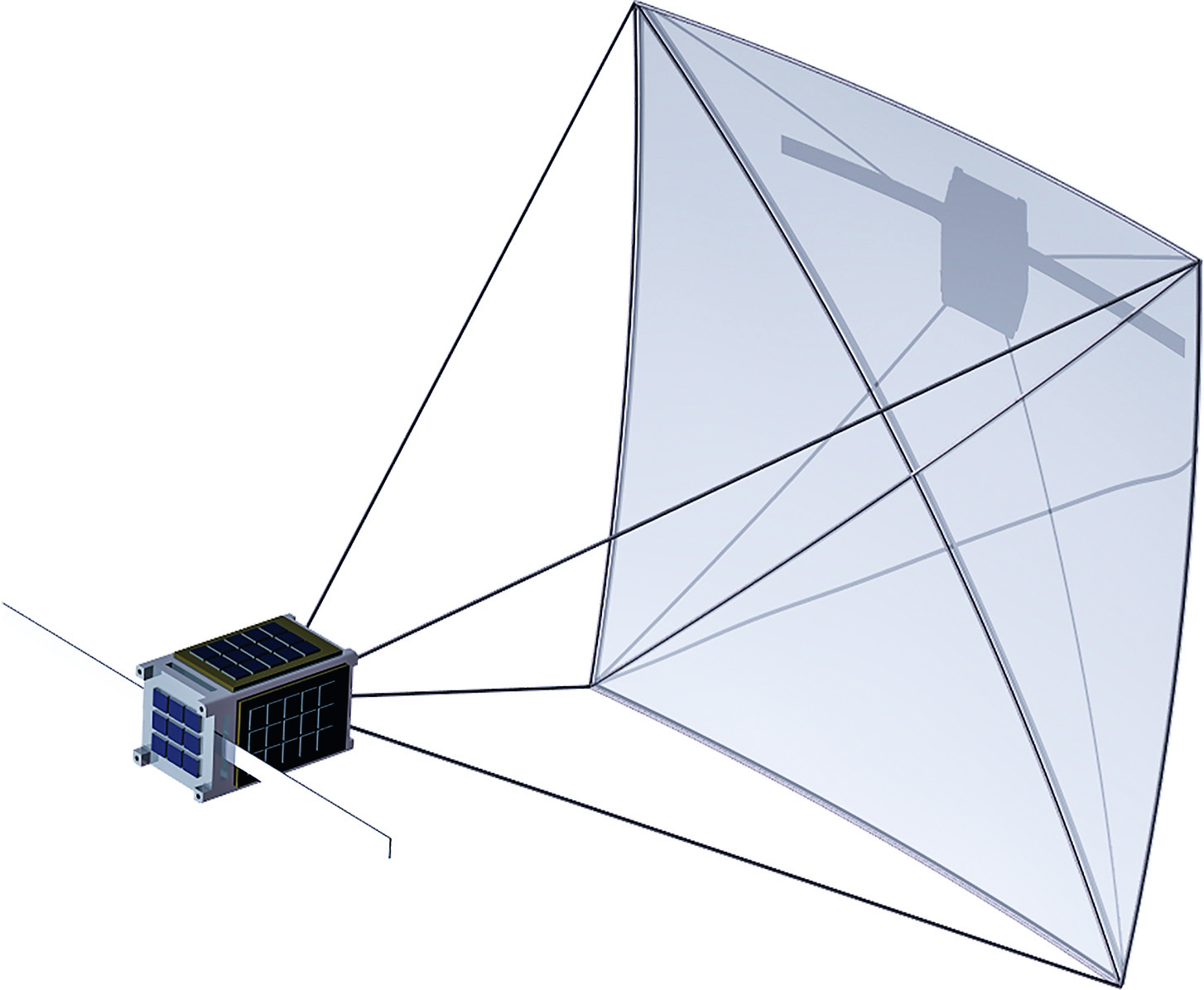
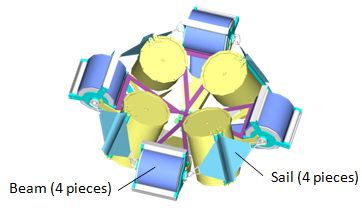
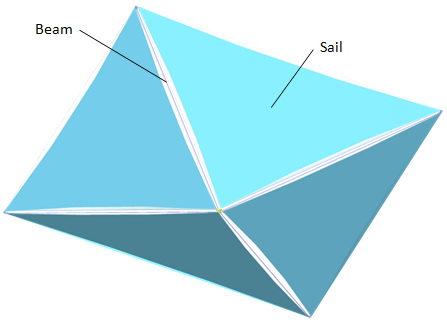
The removal system with self-deploying beams is done in the form of a four-sided pyramid attached to the object with its top. The base is a regular square. Four lateral sides of the pyramid are formed by triangular sails attached to the beams that are situated along four edges of the pyramid.
The size and form of the system are chosen in terms of ensuring the pyramid’s average cross area of 178 m2, and minimization of dimensions and weight of the system in a transportation position. The sail system switches to its operating position due to accumulated strain energy of the rolled beams.
Technical characterictics
The space debris problem emerged in the second half of the 20th century with the launch of first artificial Earth satellites. Left at earth orbits, space objects began to pose a threat to functioning spacecraft and, in particular, to stations with crews on board.
With the expansion of space exploration the population of space debris began to grow rapidly. It required appropriate measures to be taken. In 1993, a number of space agencies created the Inter-Agency Space Debris Coordination Committee (IADC). The primary purposes of this organization are to exchange information between committee members, to facilitate opportunities for cooperation, and to identify debris mitigation options. This committee has developed the “IADC Space Debris Mitigation Guidelines”.
Ukraine has also developed and adopted an appropriate document “Limitation of Near-Earth Orbital Debris Making at Operation of Space Technical Equipment” from July 19th, 2006 which dictates fundamental rules of space activities in Ukraine. All basic regulations of this document correspond to the Inter-Agency Space Debris Coordination Committee’s international recommendations.

Currently, many leading space companies are developing space debris removal systems. These systems can conditionally be divided into two types: passive and active ones.
Passive systems are mounted onto objects that have to be deorbited in advance, and are activated after their mission’s complete. These systems can use different physics for deorbitation. The Yuzhnoye State Design Office proposes devices the operation principle of which lies in augmentation of their aerodynamic drag force by creating a large surface area due to inflation/deployment of special structures.
Active systems represent autonomous spacecraft able to deorbit space debris objects and/or remove them to special graveyard orbits.
ACTIVE SYSTEMS
LEOSWEEP PROJECT
LEOSWEEP
The space debris problem becomes more and more actual with every space mission. Total weight of space debris at LEO is about 2500 tons (by 2013), and much of it is LVs upper stages. Collisions of spacecraft with space debris objects will become progressively real threat for future space missions.
Getting a capability to deorbit a few types of LVs upper stages is a relevant objective for global space community.
In 2013, Yuzhnoye SDO began works on realization of ambitious research project LEOSWEEP implemented under the FP7 Program of EU. The goal of the Project is to demonstrate the technological feasibility of a first active removal mission of a Ukrainian rocket upper stage, using ion beam technology, which provides an efficient and low-risk contactless manipulation of the debris to be deorbited.
In frames of LEOSWEEP project Yuzhnoye SDO activities were focused on demonstration mission design of LV upper stage removal with ion beam from nearby orbiting shepherd spacecraft and safety analysis of operation and upper stage reentry.
Analysis of the effect of ion beam irradiation on material of the outer surface of the Cyclone-3 LV upper stage was performed. Material sample of outer surface was manufactured and tested in simulated space environment validating safety of contactless manipulation of the object with ion beam. Analysis of the survivability of the LV upper stages during reentry showed that some parts of engine and propellant tanks may reach the ground, which requires specific drop zones.
This project was partially funded under the European Union’s Seventh Framework Programme for research, technological development and demonstration under grant agreement №607457.
Detailed information is available here: www.leosweep.upm.es
SPACE SYSTEM FOR ACTIVE SPACE DEBRIS REMOVAL
SPACE SYSTEM FOR
ACTIVE SPACE DEBRIS REMOVAL
The Space System is designed for effective deorbitation of medium-size space debris objects (with weights up to 1,000 kg and 5 m across) from low Earth orbits (up to 1,000 km).
The Space System includes:
| Interceptor Spacecraft characteristics | |
| Dry mass, kg | ~ 1 000 |
| Propellant mass for maneuvering, kg | ~ 600 |
| Number of capturing modules | 6 |
| Capturing Module characteristics | |
| Structure mass, kg | ~ 200 |
| Propellant mass for deorbitation, kg | ~ 200 |
PASSIVE SYSTEMS
INFLATABLE DRAG SYSTEM
INFLATABLE DRAG SYSTEM
The Inflatable Frame Drag System consists of an inflatable frame and a ball-shaped shell. The frame represents a tubular structure that consists of hermetic elements.The length of the sleeve elements is chosen in such a way that, when operating, the inflatable frame’s shape would ensure the stretching of external shell close to the form of a sphere.Inflating of the frame is conducted through separate sleeves each of which fills with gas its own frame element. The system does not lose its operability even if one of the frame elements is damaged by space debris.
Technical characterictics
SAIL DRAG SYSTEM
SAIL DRAG SYSTEM
The removal system with self-deploying beams is done in the form of a four-sided pyramid attached to the object with its top. The base is a regular square. Four lateral sides of the pyramid are formed by triangular sails attached to the beams that are situated along four edges of the pyramid.
The size and form of the system are chosen in terms of ensuring the pyramid’s average cross area of 178 m2, and minimization of dimensions and weight of the system in a transportation position. The sail system switches to its operating position due to accumulated strain energy of the rolled beams.
Technical characterictics